涂膠機器人的應(yīng)用
發(fā)布日期:2020-12-16 15:41:43來源:未知瀏覽次數(shù):
預(yù)計到2021年���,我國工業(yè)機器人的市場規(guī)模將達到18萬臺�����,占全球銷量的1/3以上�,遠遠大于第二大市場———日本的4萬臺市場規(guī)模�����。汽車產(chǎn)業(yè)作為主要應(yīng)用領(lǐng)域,將繼續(xù)增加工業(yè)機器人的使用量�。工業(yè)機器人的四大家族品牌機器人都有專用的仿真軟件,如Fanuc機器人的ROBOGUIDE軟件�����、ABB機器人的RobotStudio軟件���、安川MOTOMAN機器人的MotoSim軟件��、庫卡機器人的WorkVisual軟件等�。此外還有能夠支持多種機器人品牌的仿真軟件����,如RobCad、RobotMaster等�����。除此之外����,多機器人系統(tǒng)仿真的應(yīng)用也是機器人研究領(lǐng)域的熱門話題,具有廣泛的應(yīng)用前景。計算機仿真技術(shù)在自動控制系統(tǒng)和機器人領(lǐng)域的應(yīng)用也越來越普及��。在本項目中使用的是Fanuc機器人的仿真軟件ROBOGUIDE��,該軟件圍繞一個離線的機器人系統(tǒng)三維世界進行模擬����,在這個三維世界中模擬現(xiàn)實中的機器人和周邊設(shè)備的布局,通過其中的虛擬示教器進行機器人工作軌跡點的離線編程��,通過此類仿真模擬可以驗證方案的可行性并估算機器人運行時間周期��。
隨著計算機圖形學(xué)技術(shù)的發(fā)展����,近年來三維仿真技術(shù)已成為國內(nèi)外關(guān)注的熱點,企業(yè)對于計算機仿真的要求也越來越高���。三維仿真技術(shù)是用計算機技術(shù)模擬一個真實系統(tǒng)的技術(shù)�����,通過模擬系統(tǒng)來發(fā)現(xiàn)、解決以及優(yōu)化真實系統(tǒng)中出現(xiàn)的問題�����。在機器人系統(tǒng)集成中,軟件仿真技術(shù)可以在生產(chǎn)線工程建設(shè)施工之前����,對單臺或者多臺機器人系統(tǒng)組成的工作站進行模擬仿真,從而進行機器人系統(tǒng)的方案布局設(shè)計和機器人工具的可達性驗證��,以便在方案設(shè)計階段對機器人系統(tǒng)進行方案優(yōu)化��,同時可以利用機器人仿真軟件進行工作站離線編程和設(shè)備間通訊測試���,縮短項目的設(shè)計和建設(shè)工期��,避免不必要的工程返工��。
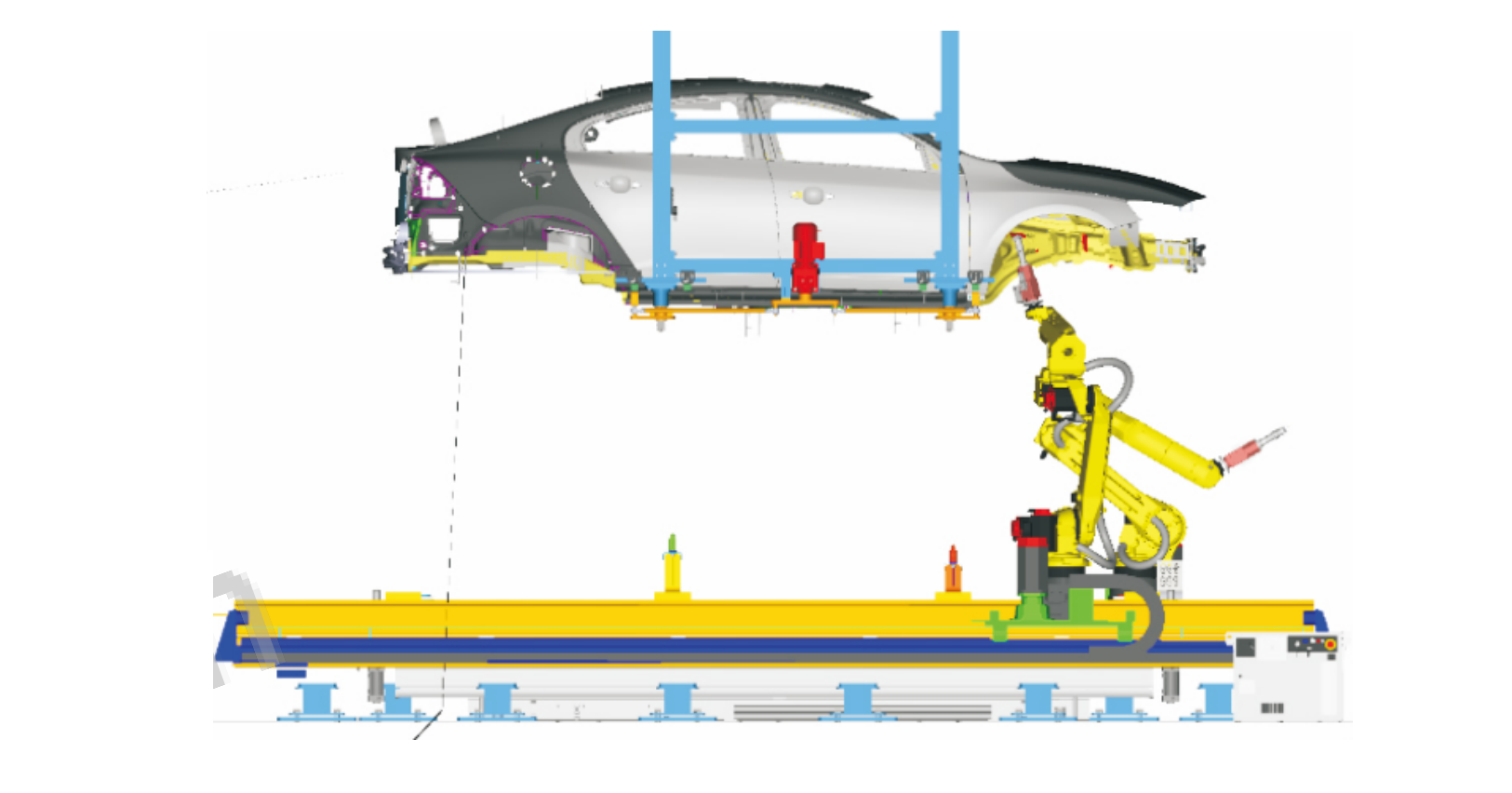
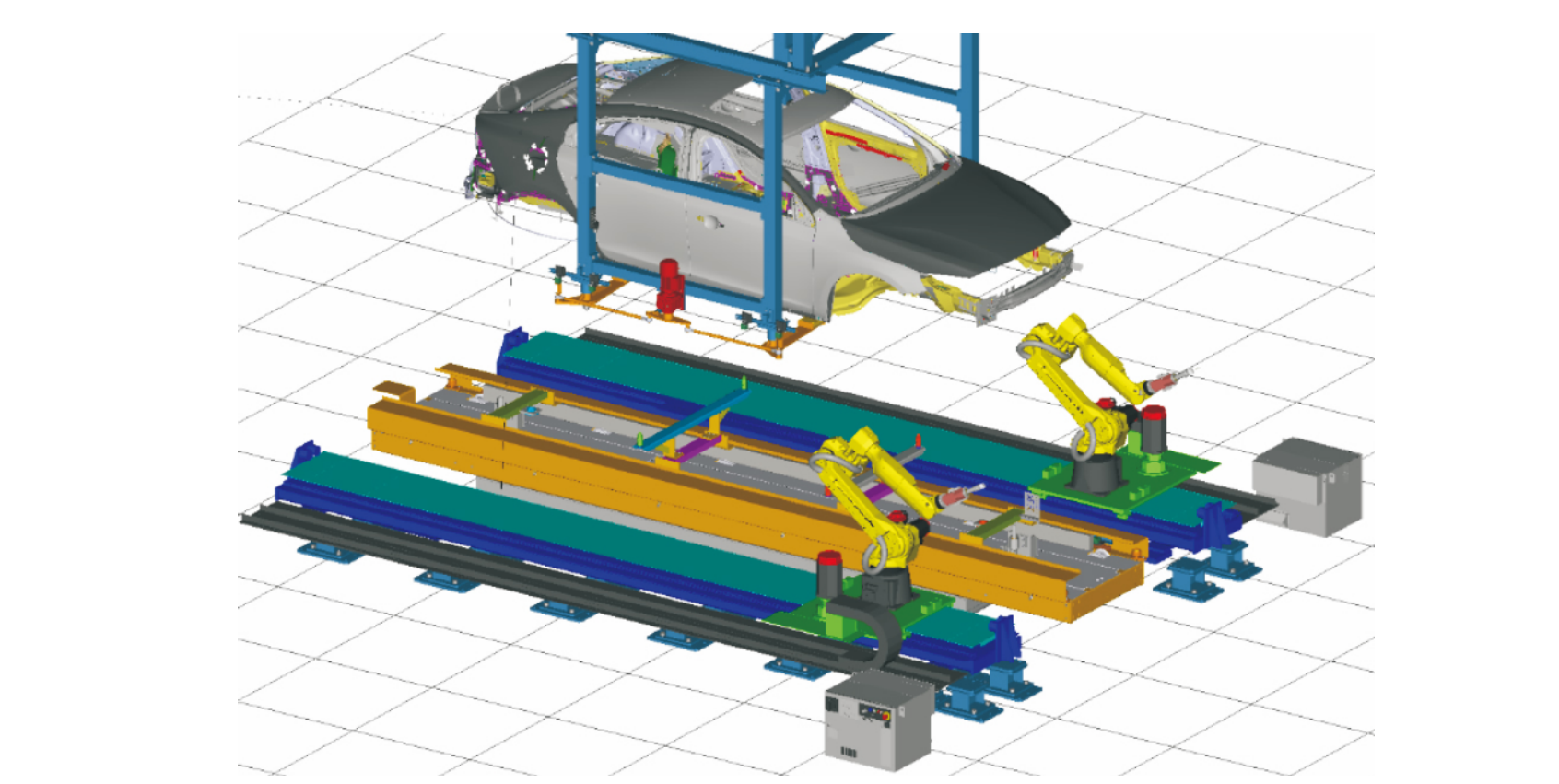
在涂裝車間涂膠機器人系統(tǒng)集成中����,使用機器人系統(tǒng)仿真軟件����,可在計算機中生成機器人本體及附加軸導(dǎo)軌、控制柜���、特定類型的工具和外圍附屬設(shè)備等的三維模型����,也可以導(dǎo)入汽車生產(chǎn)流水線上的機械化輸送設(shè)備、送排風(fēng)設(shè)備����、外圍室體、照明系統(tǒng)和控制系統(tǒng)等的三維模型����,并通過計算機三維顯示,用來確定機器人本體及工作環(huán)境的動態(tài)變化過程���。機器人系統(tǒng)仿真技術(shù)具有仿真功能齊全����、真實性強�����、可觀賞性高���、實時性較好、界面顯示直觀等優(yōu)點,可以產(chǎn)生近似真實的仿真畫面�����,為機器人系統(tǒng)集成提供了靈活方便的工具��,目前在汽車制造車間機器人系統(tǒng)集成中被普遍應(yīng)用�。
ROBOGUIDE是Fanuc機器人的核心應(yīng)用軟件之一,可以實現(xiàn)對搬運�、弧焊、噴涂和點焊等系統(tǒng)的仿真模擬��,仿真軟件界面和傳統(tǒng)的WINDOWS界面相似����,由菜單欄、工具欄�����、工作區(qū)和狀態(tài)欄等部分組成�����,操作界面友好簡單���,軟件的操作習(xí)慣比較容易適應(yīng)���。在新
建仿真單元還未添加機器人模型和設(shè)備模型之前���,會有一個10m×10m的正方形地板,所有的模型及仿真都是在此基礎(chǔ)之上完成�����。
對仿真軟件在涂裝車間底涂涂膠機器人系統(tǒng)集成中的應(yīng)用加以說明��。機器人系統(tǒng)仿真軟件最常用的功能有工作站的設(shè)計���、機器人型號選型���、可達性驗證、離線編程和碰撞檢測等�。
利用ROBOGUIDE仿真軟件進行機器人系統(tǒng)仿真的步驟主要分為新建控制器模型、配置控制器及附加軸相關(guān)參數(shù)�����、導(dǎo)入工件模型及外圍附屬設(shè)備模型�、涂膠工具可達性驗證��、優(yōu)化機器人工藝布局���、機器人涂膠軌跡離線編程等���。
新建機器人工作站控制參數(shù)設(shè)置
在新建機器人控制時����,需要設(shè)置與控制器有關(guān)的一系列參數(shù)���,其中需要配置的參數(shù)主要有工作站名稱����、仿真類型�、軟件版本、機器人型號����、附加軸、軟件語種等���。機器人如果有附加軸配置�,還需在控制柜的控制啟動模式之下對附加軸參數(shù)進行配置,其中需要配置的參數(shù)主要有控制軸組號�����、附加軸類型及伺服電機類型�����、附加軸的安裝及移動方向���、移動極限位置�、加減速時間����、伺服放大器及制動器的相關(guān)參數(shù)等。
機器人及附加軸的參數(shù)配置完成之后���,還需導(dǎo)入工件模型����、機械化輸送設(shè)備模型�、工具模型等,并對模型的工具坐標系進行配置�,按照初步設(shè)計的工藝布局對機器人系統(tǒng)工作站進行位置參數(shù)的設(shè)置�。
機器人系統(tǒng)涂膠工具可達性驗證
機器人仿真單元模型新建完成之后��,需進行機器人工具在工件各個涂膠位置的可達性驗證����,以初步確定機器人系統(tǒng)工藝布局的合理性。示教機器人軌跡之前�����,需先建立機器人的工具坐標系�,此處采用直接輸入法新建工具坐標系�����。為了驗證涂膠工具的可達性��,需在工件的幾個關(guān)鍵涂膠位置或者極限位置通過機器人示教測試涂膠工具的可達性�����、涂膠位置機器人姿態(tài)的合理性和不同位置涂膠姿態(tài)過渡的連續(xù)性�����,為優(yōu)化機器人的工藝布局提供參考。對于汽車的涂膠應(yīng)用��,根據(jù)汽車底涂涂膠工藝的不同����,一般需測試前翼子板內(nèi)側(cè)、裙邊����、后翼子板內(nèi)側(cè)、后備箱底部等部位��。
噴蠟完整性及操作性分析原則一般情況下����,對于車身噴蠟完整性及操作性的分析,也包含在涂膠密封完整性工作內(nèi)容中�,其主要分析原則(標準)如下。
噴蠟完整性分析原則建議優(yōu)先噴蠟位置:門檻梁內(nèi)腔�����。在質(zhì)量及生產(chǎn)條件允許的情況下�����,建議增加位置:)側(cè)門下部內(nèi)腔、后背門下部內(nèi)腔�����、機蓋前端內(nèi)腔���;)地板下部各縱梁����、橫梁內(nèi)腔����。
噴蠟操作性分析原則依據(jù)現(xiàn)場實際噴蠟槍嘴����,模擬噴蠟過程,無遮擋��,噴蠟操作過程中不會與車身現(xiàn)有制件相互干涉�����。
涂裝密封使車身具有良好的密封性、防銹性���、耐久性和隔音降噪性���。在車型開發(fā)過程中,針對車身涂裝密封進行SE分析�,可有效減少車型生產(chǎn)過程中的涂膠無法操作、車身密封不良����、焊縫邊緣銹蝕等問題。